I2C 每一位信号的时序流程,而 I2C 通信在字节级的传输中,也有固定的时序要求。I2C 通信的起始信号(Start)后,首先要发送一个从机的地址,这个地址一共有7位,紧跟着的第8位是数据方向位(R/W),“0”表示接下来要发送数据(写),‘“1”表示接下来是请求数据(读)。
我们知道,打电话的时候,当拨通电话,接听方捡起电话肯定要回一个“喂”,这就是告诉拨电话的人,这边有人了。同理,这个第九位 ACK 实际上起到的就是这样一个作用。当我们发送完了这7位地址和1位方向后,如果发送的这个地址确实存在,那么这个地址的器件应该回应一个 ACK(拉低 SDA 即输出“0”),如果不存在,就没“人”回应 ACK(SDA将保持高电平即“1”)。
那我们写一个简单的程序,访问一下我们板子上的 EEPROM 的地址,另外再写一个不存在的地址,看看它们是否能回一个 ACK,来了解和确认一下这个问题。
我们板子上的 EEPROM 器件型号是 24C02,在 24C02 的数据手册3.6节中可查到,24C02 的7位地址中,其中高4位是固定的 0b1010,而低3位的地址取决于具体电路的设计,由芯片上的 A2、A1、A0 这3个引脚的实际电平决定,来看一下我们的 24C02 的电路图,它和 24C01 的原理图完全一样,如图14-4所示。
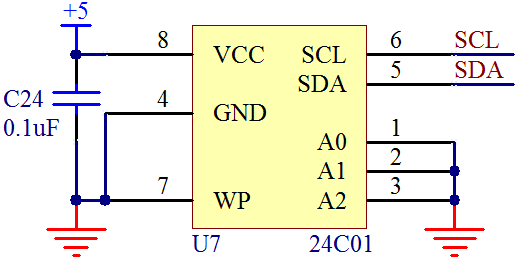
图14-4 24C02 原理图
从图14-4可以看出来,我们的 A2、A1、A0 都是接的 GND,也就是说都是0,因此 24C02 的7位地址实际上是二进制的 0b1010000,也就是 0x50。我们用 I2C 的协议来寻址 0x50,另外再寻址一个不存在的地址 0x62,寻址完毕后,把返回的 ACK 显示到我们的 1602 液晶上,大家对比一下。
/***************************Lcd1602.c 文件程序源代码*****************************/
#include <reg52.h>
#define LCD1602_DB P0
sbit LCD1602_RS = P1^0;
sbit LCD1602_RW = P1^1;
sbit LCD1602_E = P1^5;
/* 等待液晶准备好 */
void LcdWaitReady(){
unsigned char sta;
LCD1602_DB = 0xFF;
LCD1602_RS = 0;
LCD1602_RW = 1;
do {
LCD1602_E = 1;
sta = LCD1602_DB; //读取状态字
LCD1602_E = 0;
} while (sta & 0x80); //bit7 等于 1 表示液晶正忙,重复检测直到其等于 0 为止
}
/* 向 LCD1602 液晶写入一字节命令,cmd-待写入命令值 */
void LcdWriteCmd(unsigned char cmd){
LcdWaitReady();
LCD1602_RS = 0;
LCD1602_RW = 0;
LCD1602_DB = cmd;
LCD1602_E = 1;
LCD1602_E = 0;
}
/* 向 LCD1602 液晶写入一字节数据,dat-待写入数据值 */
void LcdWriteDat(unsigned char dat){
LcdWaitReady();
LCD1602_RS = 1;
LCD1602_RW = 0;
LCD1602_DB = dat;
LCD1602_E = 1;
LCD1602_E = 0;
}
/* 设置显示 RAM 起始地址,亦即光标位置,(x,y)-对应屏幕上的字符坐标 */
void LcdSetCursor(unsigned char x, unsigned char y){
unsigned char addr;
if (y == 0){ //由输入的屏幕坐标计算显示 RAM 的地址
addr = 0x00 + x; //第一行字符地址从 0x00 起始
}else{
addr = 0x40 + x; //第二行字符地址从 0x40 起始
}
LcdWriteCmd(addr | 0x80); //设置 RAM 地址
}
/* 在液晶上显示字符串,(x,y)-对应屏幕上的起始坐标,str-字符串指针 */
void LcdShowStr(unsigned char x, unsigned char y, unsigned char *str){
LcdSetCursor(x, y);//设置起始地址
while (*str != '\0'){ //连续写入字符串数据,直到检测到结束符
LcdWriteDat(*str++);
}
}
/* 初始化 1602 液晶 */
void InitLcd1602(){
LcdWriteCmd(0x38); //16*2 显示,5*7 点阵,8 位数据接口
LcdWriteCmd(0x0C); //显示器开,光标关闭
LcdWriteCmd(0x06); //文字不动,地址自动+1
LcdWriteCmd(0x01); //清屏
}
/*****************************main.c 文件程序源代码******************************/
#include <reg52.h>
#include <intrins.h>
#define I2CDelay() {_nop_();_nop_();_nop_();_nop_();}
sbit I2C_SCL = P3^7;
sbit I2C_SDA = P3^6;
bit I2CAddressing(unsigned char addr);
extern void InitLcd1602();
extern void LcdShowStr(unsigned char x, unsigned char y, unsigned char *str);
void main(){
bit ack;
unsigned char str[10];
InitLcd1602(); //初始化液晶
ack = I2CAddressing(0x50); //查询地址为 0x50 的器件
str[0] = '5'; //将地址和应答值转换为字符串
str[1] = '0';
str[2] = ':';
str[3] = (unsigned char)ack + '0';
str[4] = '\0';
LcdShowStr(0, 0, str); //显示到液晶上
ack = I2CAddressing(0x62); //查询地址为 0x62 的器件
str[0] = '6'; //将地址和应答值转换为字符串
str[1] = '2';
str[2] = ':';
str[3] = (unsigned char)ack + '0';
str[4] = '\0';
LcdShowStr(8, 0, str); //显示到液晶上
while (1);
}
/* 产生总线起始信号 */
void I2CStart(){
I2C_SDA = 1; //首先确保 SDA、SCL 都是高电平
I2C_SCL = 1;
I2CDelay();
I2C_SDA = 0; //先拉低 SDA
I2CDelay();
I2C_SCL = 0; //再拉低 SCL
}
/* 产生总线停止信号 */
void I2CStop(){
I2C_SCL = 0; //首先确保 SDA、SCL 都是低电平
I2C_SDA = 0;
I2CDelay();
I2C_SCL = 1; //先拉高 SCL
I2CDelay();
I2C_SDA = 1; //再拉高 SDA
I2CDelay();
}
/* I2C 总线写操作,dat-待写入字节,返回值-从机应答位的值 */
bit I2CWrite(unsigned char dat){
bit ack; //用于暂存应答位的值
unsigned char mask; //用于探测字节内某一位值的掩码变量
for (mask=0x80; mask!=0; mask>>=1){ //从高位到低位依次进行
if ((mask&dat) == 0){ //该位的值输出到 SDA 上
I2C_SDA = 0;
}else{
I2C_SDA = 1;
}
I2CDelay();
}
I2C_SCL = 1; //拉高 SCL
I2CDelay();
I2C_SCL = 0; //再拉低 SCL,完成一个位周期
I2C_SDA = 1; //8 位数据发送完后,主机释放 SDA,以检测从机应答
I2CDelay();
I2C_SCL = 1; //拉高 SCL
ack = I2C_SDA; //读取此时的 SDA 值,即为从机的应答值
I2CDelay();
I2C_SCL = 0; //再拉低 SCL 完成应答位,并保持住总线
return ack; //返回从机应答值
}
/* I2C 寻址函数,即检查地址为 addr 的器件是否存在,返回值-从器件应答值 */
bit I2CAddressing(unsigned char addr){
bit ack;
I2CStart(); //产生起始位,即启动一次总线操作
//器件地址需左移一位,因寻址命令的最低位
//为读写位,用于表示之后的操作是读或写
ack = I2CWrite(addr<<1);
I2CStop(); //不需进行后续读写,而直接停止本次总线操作
return ack;
}
我们把这个程序在 KST-51 开发板上运行完毕,会在液晶上边显示出来我们预想的结果,主机发送一个存在的从机地址,从机会回复一个应答位,即应答位为0;主机如果发送一个不存在的从机地址,就没有从机应答,即应答位为1。
前面的章节中已经提到利用库函数nop()可以进行精确延时,一个nop()的时间就是一个机器周期,这个库函数包含在 intrins.h 这个文件中,如果要使用这个库函数,只需要在程序最开始,和包含 reg52.h 一样,include
还有一点要提一下,I2C 通信分为低速模式 100kbit/s、快速模式 400kbit/s 和高速模式 3.4Mbit/s。
因为所有的 I2C 器件都支持低速,但却未必支持另外两种速度,所以作为通用的 I2C 程序我们选择 100k 这个速率来实现,也就是说实际程序产生的时序必须小于等于 100k 的时序参数,很明显也就是要求 SCL 的高低电平持续时间都不短于 5 us,因此我们在时序函数中通过插入 I2CDelay()这个总线延时函数(它实际上就是4个 NOP 指令,用 define 在文件开头做了定义),加上改变 SCL 值语句本身占用的至少一个周期,来达到这个速度限制。如果以后需要提高速度,那么只需要减小这里的总线延时时间即可。
此外我们要学习一个发送数据的技巧,就是 I2C 通信时如何将一个字节的数据发送出去。
大家注意函数 I2CWrite 中,用的那个 for 循环的技巧。for (mask=0x80; mask!=0; mask>>=1),由于 I2C 通信是从高位开始发送数据,所以我们先从最高位开始,0x80 和 dat 进行按位与运算,从而得知 dat 第7位是0还是1,然后右移一位,也就是变成了用 0x40 和 dat 按位与运算,得到第6位是0还是1,一直到第0位结束,最终通过 if 语句,把 dat 的8位数据依次发送了出去。其它的逻辑大家对照前边讲到的理论知识,认真研究明白就可以了。
邮箱 626512443@qq.com
电话 18611320371(微信)
QQ群 235681453
Copyright © 2015-2024
备案号:京ICP备15003423号-3
